I have a C&LS WM 4-8-4 and two C&LS 4-6-6-4's. I run them regularly in my operating sessions.
The late Russ Wilcox told me about Henry and the upcoming WM 4-8-4. I called Henry and asked about the minimum radius because my old layout had a 50 in radius curve in the wye leading to my engine house. Henry told me that the pilot model built to scale needed a radius of about 100 in. He had modified the final design to take a 72 in radius. I told him I had a 50 in radius curve and he replied "What are you, a tin plate guy?" I said "have you read John Armstrong's track planning books?" He replied "Who is John Armstrong."
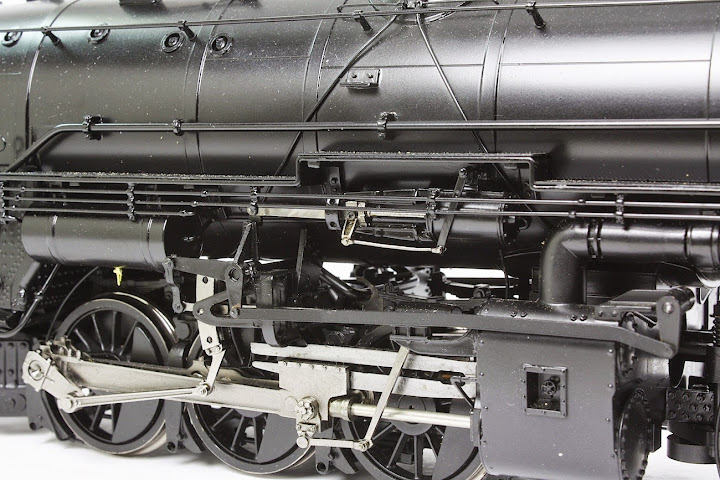
I modified my 4-8-4 to take a 50 in radius. I substituted 33 in plastic pilot truck wheels for the 36 in metal wheels and cut notches in the tailbeam so the trailing truck can swing through the tailbeam as shown in the photo below.
The C&LS engines do have a coasting drive which uses a double cut worm. The next two photos show the rear engine on my WM 4-6-6-4 with 1) the gear box without the cover showing the worm gear and 2) the gearbox with the cover showing C&LS on the cover.
I bought these engines in 1998 and my layout was already DCC equipped. The original Pittman motor was a high current motor. There weren't many high current decoders available and most used pulse width modulation (PWM) frequencies in the audible range. The C&LS engines were quiet on filtered DC but they were noisy on full wave DC and noisy with DCC decoders using PWM frequencies in the audible range. As far as I could determine, the only decoders with a high PWM frequency Zimo decoders that used a crystal to generate a 16 KHz PWM frequency. I installed Zimo decoders and the locos were reasonably quiet.
The Zimo MX65S decoders have back EMF but it didn't work very well with the C&LS coasting drive and I wasn't satisfied with the speed control I could get. I discussed this with Henry and he graciously came to my house on the way to a meet, GAVE me three Globe gearhead motors and installed two of them before he had to leave. I installed the third Globe motor. The locos are much more controllable with the Globe motors. The Globe motors draw much lower current and I am planning to replace the Zimo control decoders and Soundtraxx DSX sound deocoders with Tsunamis in these locos.
The first photo shows a 4-6-6-4 mechanism and boiler with a Globe motor installed. The original Pittman motor is in front of the mechanism. The loco is easy to take apart. There are only 4 screws, two at the back of the cab and two that hold the rear engine cylinders to the frame.
Larry Kline